TinyDVR - Compacto y Potente
—— Basado en la versión Master V1.1 y Slave V7.2 de TinyDVR
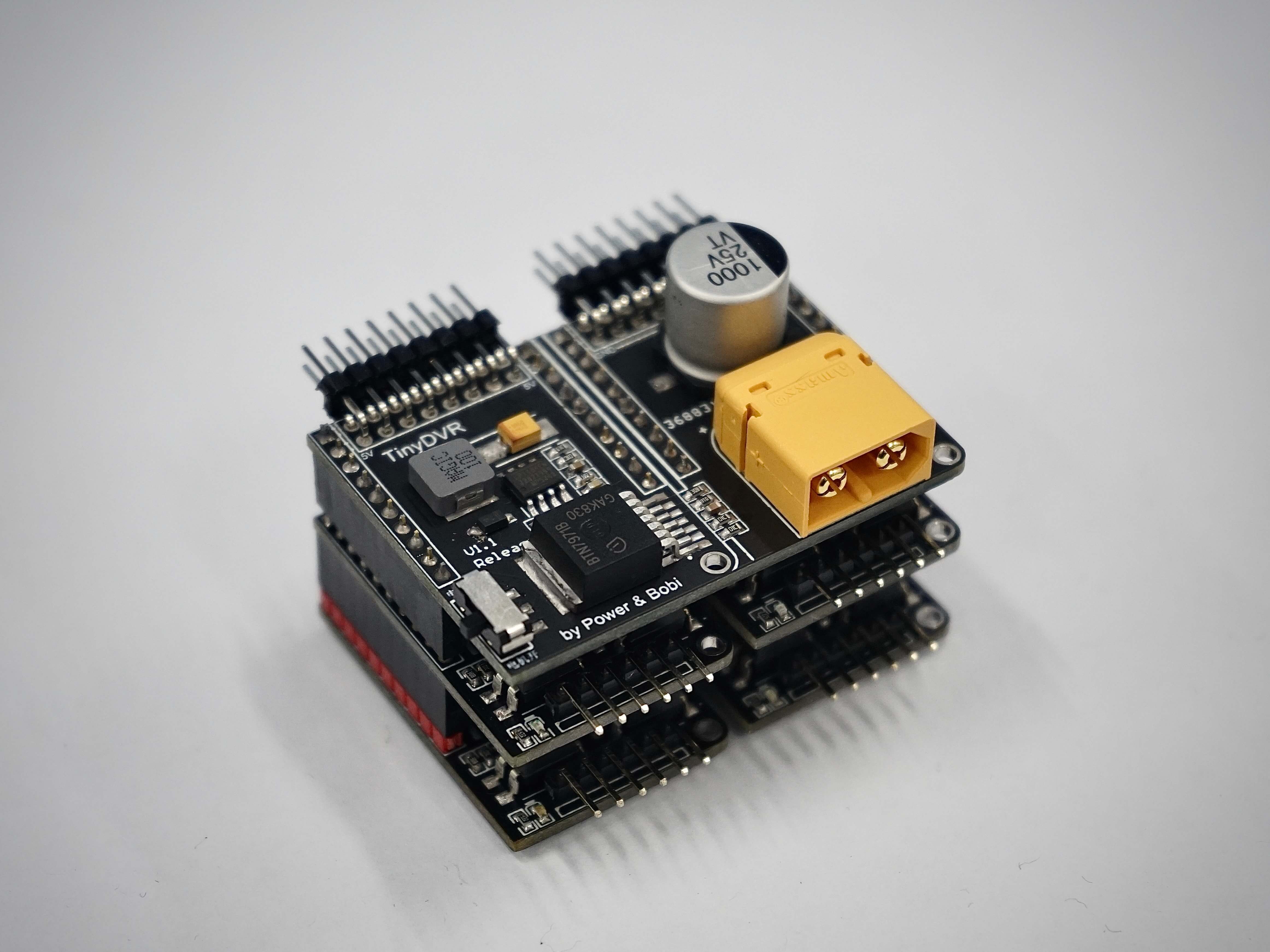
TinyDVR es un conjunto de controladores de motores que incluye una placa madre (Master) y una placa secundaria (Slave). La sección de alimentación y la de control se encuentran separadas, lo que, en comparación con su predecesor ZenDriver, reduce significativamente el tamaño y aumenta en gran medida la capacidad de expansión. Puedes apilar diferentes cantidades de placas secundarias según tus necesidades, lo que te permite controlar n motores.
Repositorio del proyecto: linyuxuanlin/TinyDVR
Vista previa en línea del proyecto:
TinyDVR_Master:
TinyDVR_Slave:
Especificaciones Básicas
- Voltaje de entrada: 7.2 ~ 20 V
- Corriente de salida: 0 ~ 68 A
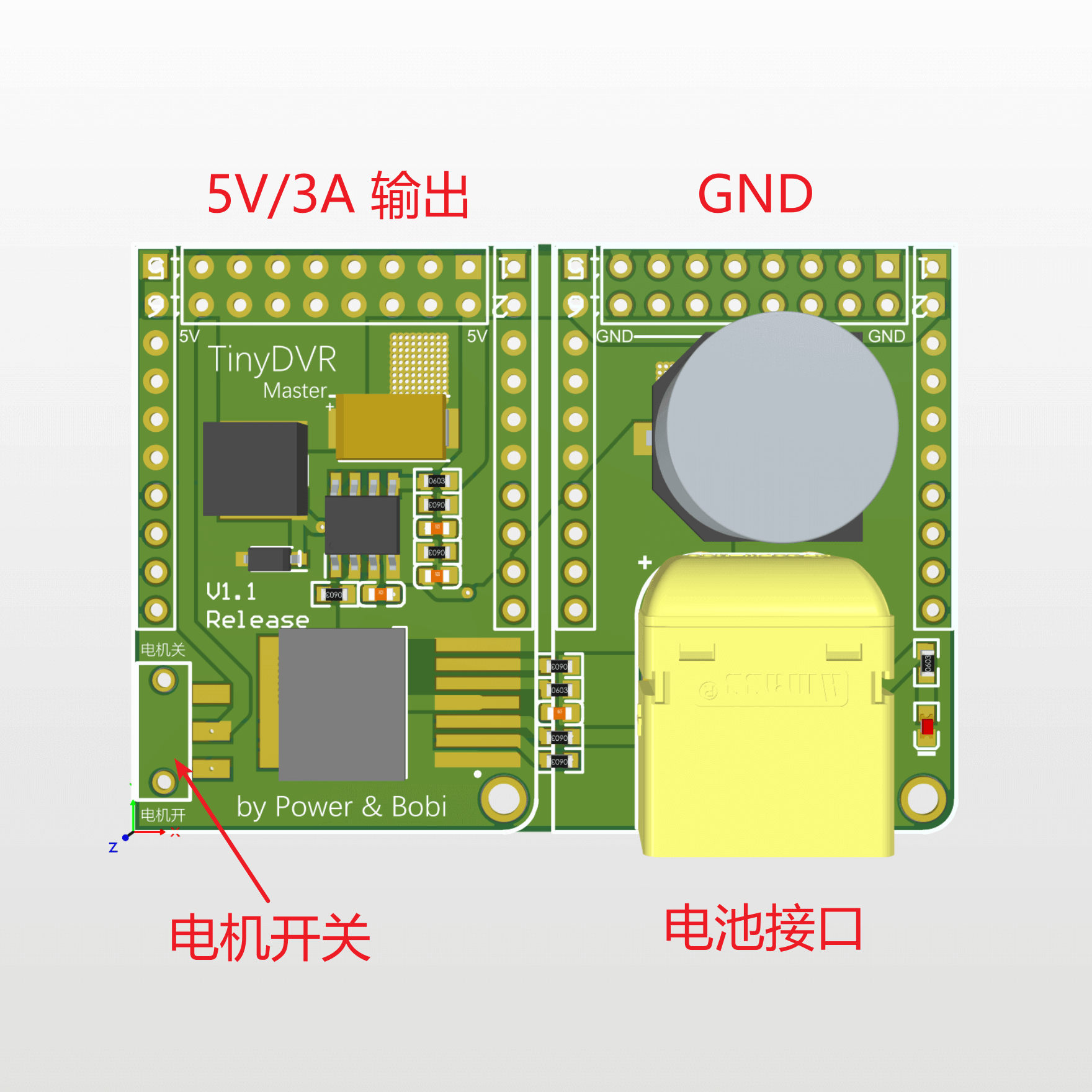
- Proporciona una salida de 5V / 3A para su uso en controladores y otros módulos.
- Dispositivos de protección: circuitos integrados de protección contra inversión de polaridad y aislamiento óptico.
- Conexión sencilla para motores: es compatible con motores de corriente continua de reducción comunes en el mercado (con codificador), que se pueden conectar directamente mediante un conector de 6 pines (sin necesidad de invertir la polaridad).
- Expandible: una placa madre puede apilar n placas secundarias para controlar n motores.
Definición de Interfaz
TinyDVR Master
TinyDVR Slave
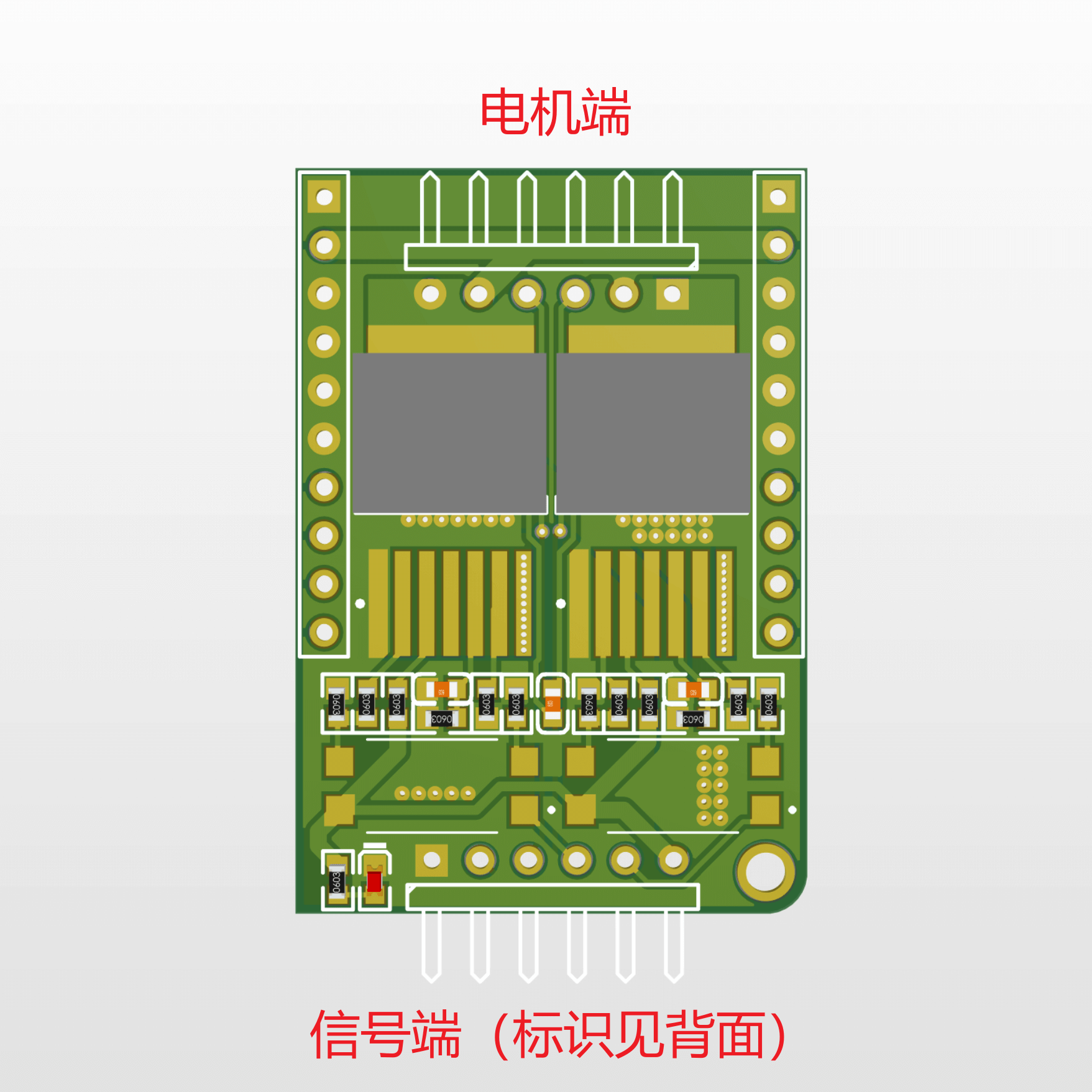
Detalle de los pines en la parte posterior:
- + : Proporciona una salida de 5V / 3A
- 1 : Puerto IN1, entrada de la señal PWM 1
- 2 : Puerto IN2, entrada de la señal PWM 2
- A : Puerto de señal de fase A del codificador
- B : Puerto de señal de fase B del codificador
- - : GND
Guía de Uso
Método de Prueba
- Conecta una fuente de alimentación de 7.2 ~ 20 V
- Conecta un motor en la placa secundaria correspondiente
- Conecta el puerto de suministro de 5V a los puertos IN1/IN2, en este punto el motor girará en dirección positiva / negativa
Conexión a un Microcontrolador
- Conecta una fuente de alimentación de 7.2 ~ 20 V
- Conecta un motor en la placa secundaria correspondiente
- Conecta el cable de tierra en la placa controladora al cable de tierra del microcontrolador
- Conecta los puertos IN1 e IN2 al puerto PWM correspondiente del microcontrolador (configurado en el código)
- Para obtener instrucciones detalladas, consulta los ejemplos de prueba en el repositorio del proyecto.
Curiosidades
Placas secundarias tempranas: 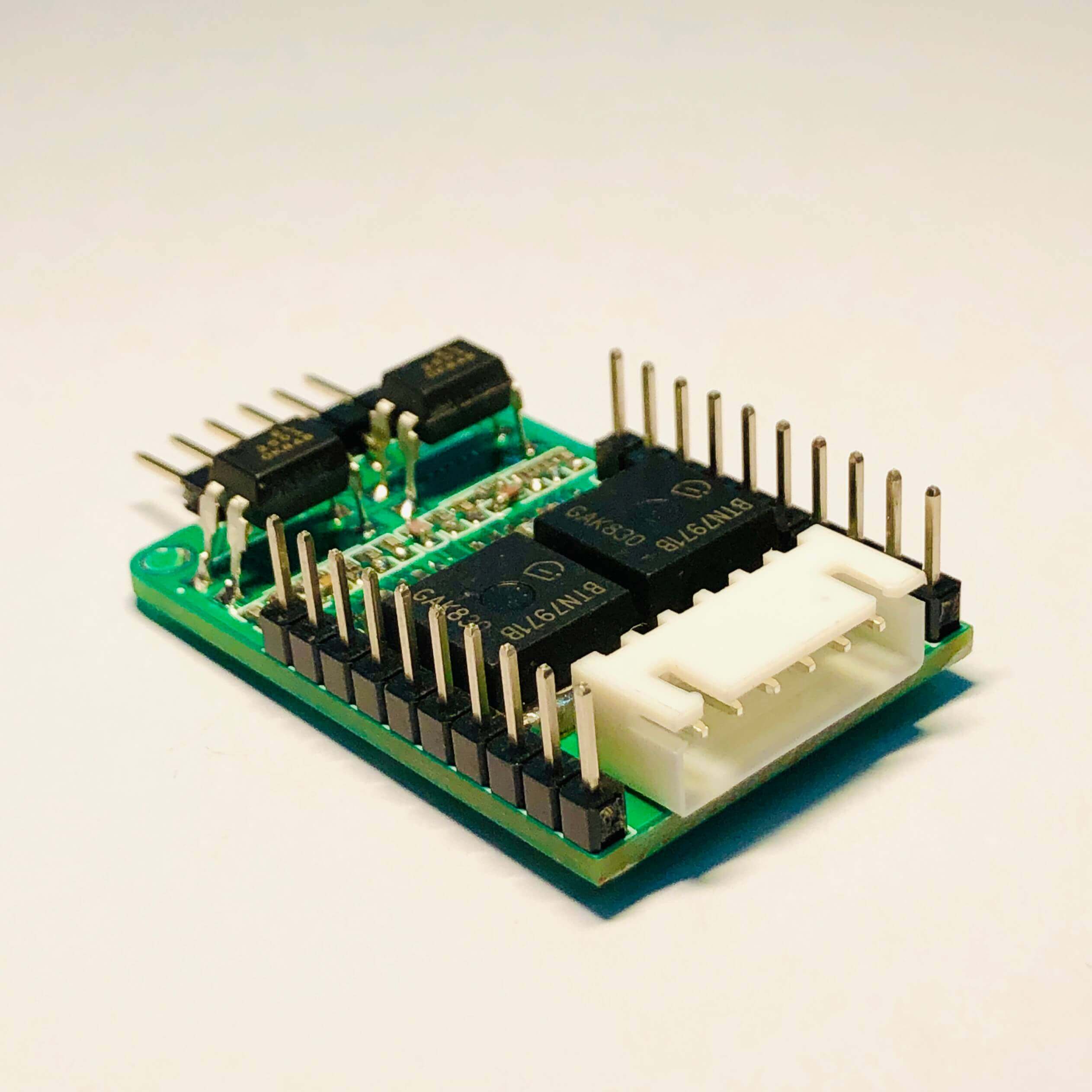
Proceso de soldadura en masa:

Dirección original del artículo: https://wiki-power.com/ Este artículo está protegido por la licencia CC BY-NC-SA 4.0. Si desea reproducirlo, por favor indique la fuente.
Este post está traducido usando ChatGPT, por favor feedback si hay alguna omisión.