Hack.init()黑客马拉松
# Hack.init( ) 黑客马拉松
—— Wight · Un sistema de iluminación descentralizado basado en la plataforma en la nube.
Repositorio del proyecto: [**linyuxuanlin / Wight**](https://github.com/linyuxuanlin/Wight)
## Contexto
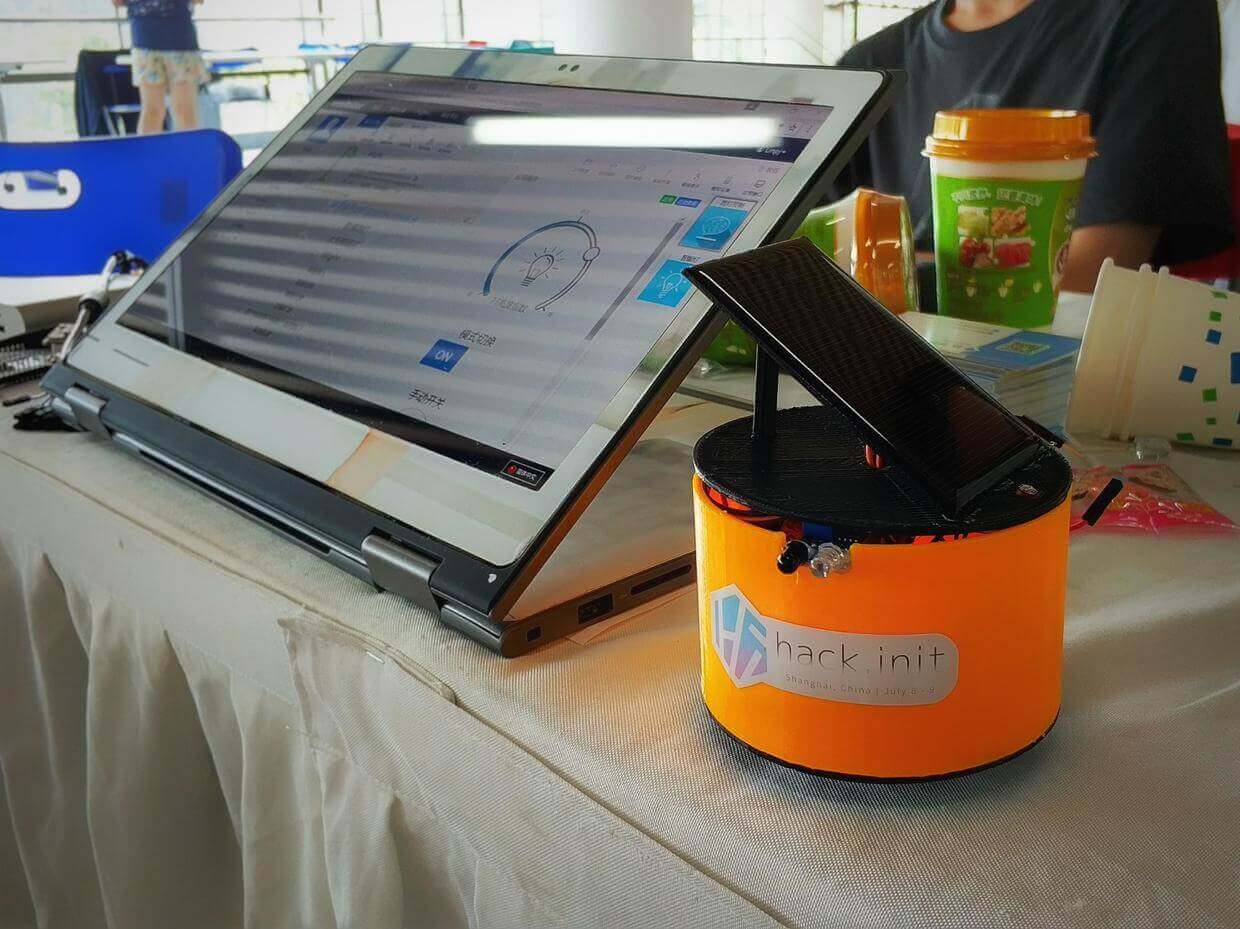
Este proyecto se creó durante el hack.init() Hackathon de 2017. Se pasaron más de 20 horas programando, modelando, depurando una variedad de problemas, esperando impresiones, y finalmente, presentando y dando discursos para obtener algo que se asemejara a un producto terminado.
El proyecto se centra principalmente en un sistema de iluminación para farolas en áreas rurales y remotas. Aunque el concepto suena abstracto, en realidad, funciona como una farola convencional.
## Puntos de Innovación del Proyecto
- **Alimentación Solar.** Capaz de autoabastecerse (según la información detallada, la energía solar es suficiente para encender los LED).
- **Descentralización.** Proporciona una solución conveniente para áreas remotas donde no es práctico tender cables.
- **Algoritmos Inteligentes.** Detecta la oscuridad y enciende automáticamente las luces; aumenta la intensidad de los LED al detectar la presencia de personas o vehículos.
- **Control Unificado en la Nube.** Utiliza un controlador principal GSM, lo que permite el ajuste remoto a gran escala.
- **Escalabilidad.** Ofrece diversas funciones personalizadas para usuarios con necesidades específicas de iluminación.
## Principios e Implementación
**Código:**
```cpp
#define BUTTONS_address "channel/widget4_0/cmd/control" // Comandos de encendido y apagado
#define LIGHT_STATUS_address "channel/widget4_0/data/light" // Estado de encendido y apagado
#define ITENSITY_DATA_address "channel/widget4_0/data/lightsensor"
#define LEDPIN1 D1 // Definición de los pines de control de las bombillas
#define LEDPIN2 D2
#define LEDPIN3 D3
#define LEDPIN4 D5
#define CHECKIN1 A0
#define CHECKIN2 D4
```
```cpp
int autostate = 2;
int light_state = 2;
void buttons_function(uint8_t *payload, uint32_t len) // Función de botones (Auto y Riego)
{
uint8_t SwitchKey;
uint8_t SwitchKey2;
aJsonClass aJson;
aJsonObject *root = aJson.parse((char *)payload);
if (root == NULL)
{
aJson.deleteItem(root);
return;
}
aJsonObject *_switch = aJson.getObjectItem(root, "mode");
if (_switch != NULL)
{
SwitchKey = atoi(_switch->valuestring);
if (SwitchKey)
{
SerialUSB.println("Encendido automático");
autostate = 1;
IntoRobot.publish(LIGHT_STATUS_address, "1");
}
else
{
SerialUSB.println("Apagado automático");
autostate = 0;
IntoRobot.publish(LIGHT_STATUS_address, "0");
}
}
aJsonObject *_switch2 = aJson.getObjectItem(root, "manual");
if (_switch2 != NULL)
{
SwitchKey2 = atoi(_switch2->valuestring);
if (SwitchKey2)
{
SerialUSB.println("Encendido manual");
light_state = 1;
IntoRobot.publish(LIGHT_STATUS_address, "1");
}
else
{
SerialUSB.println("Apagado manual");
light_state = 0;
IntoRobot.publish(LIGHT_STATUS_address, "0");
}
}
else
{
}
aJson.deleteItem(root);
}
void lightup()
{
digitalWrite(LEDPIN1, HIGH); // Encender bombilla
digitalWrite(LEDPIN2, HIGH); // Encender bombilla
digitalWrite(LEDPIN3, HIGH); // Encender bombilla
digitalWrite(LEDPIN4, HIGH); // Encender bombilla
}
void light_half_up()
{
analogWrite(LEDPIN1, 80); // Encender bombilla (mitad de intensidad)
analogWrite(LEDPIN2, 80); // Encender bombilla (mitad de intensidad)
analogWrite(LEDPIN3, 80); // Encender bombilla (mitad de intensidad)
analogWrite(LEDPIN4, 80); // Encender bombilla (mitad de intensidad)
}
# Código Traducido
```cpp
}
void apagarLuces()
{
digitalWrite(LEDPIN1, LOW);
digitalWrite(LEDPIN2, LOW);
digitalWrite(LEDPIN3, LOW);
digitalWrite(LEDPIN4, LOW);
}
int obtenerNivelLuz()
{
int lecturaLuz = analogRead(CHECKIN1);
SerialUSB.println(lecturaLuz);
return lecturaLuz;
}
int obtenerDatosIR()
{
int estadoIR = digitalRead(CHECKIN2);
SerialUSB.println(estadoIR);
return estadoIR;
}
void modoAutomatico()
{
if (obtenerNivelLuz() >= 400)
{
IntoRobot.publish(LIGHT_STATUS_address, "1");
if (obtenerDatosIR() == 0)
encenderLuces();
else
encenderMitadLuces();
}
else
{
IntoRobot.publish(LIGHT_STATUS_address, "0");
apagarLuces();
}
}
void funcionImpresionHUMEDAD(uint8_t *datos, uint32_t longitud)
{
}
void configuracion()
{
pinMode(D4, INPUT);
SerialUSB.begin(115200);
SerialUSB.println("Hola, mundo");
pinMode(LEDPIN1, OUTPUT);
pinMode(LEDPIN2, OUTPUT);
pinMode(LEDPIN3, OUTPUT);
pinMode(LEDPIN4, OUTPUT);
IntoRobot.subscribe(BUTTONS_address, NULL, funcionBotones);
IntoRobot.subscribe(ITENSITY_DATA_address, NULL, funcionImpresionHUMEDAD);
}
void bucle()
{
int mapeoLuz = map(obtenerNivelLuz(), 0, 1024, 100, 0);
IntoRobot.publish(LIGHT, mapeoLuz);
SerialUSB.println(obtenerNivelLuz());
if (autostate == 0)
{
if (estadoLuz == 1)
encenderLuces();
else
apagarLuces();
}
else if (autostate == 1)
{
SerialUSB.println("Estado = 1");
modoAutomatico();
}
delay(100);
}
```
FAQ
P: ¿Habrá un seguimiento del proyecto en el futuro? R: Actualmente no tenemos planes de seguimiento. Aunque el proyecto tiene un buen potencial innovador, todavía debe validar su valor de aplicación comercial.
Resumen
No ganamos el concurso esta vez. Sin embargo, el concurso nos ayudó a mejorar nuestras habilidades para programar y presentar, además de experimentar el trabajo extra y la presión de cumplir con los plazos. También conocimos a muchas personas y recibimos muchos obsequios como recuerdo.
Referencias y Agradecimientos
- **Miembros del equipo:** Lin Peijie, Huang Yuefeng, Zhang Ziyi
- [Plataforma en la nube de IntoRobot](https://www.intorobot.com/)
> Dirección original del artículo: <https://wiki-power.com/>
> Este artículo está protegido por la licencia [CC BY-NC-SA 4.0](https://creativecommons.org/licenses/by/4.0/deed.zh). Si desea reproducirlo, por favor indique la fuente.
> Este post está traducido usando ChatGPT, por favor [**feedback**](https://github.com/linyuxuanlin/Wiki_MkDocs/issues/new) si hay alguna omisión.