DJI N3 Flight Controller - Reference Materials
Resources and Software Downloads
Basic Knowledge
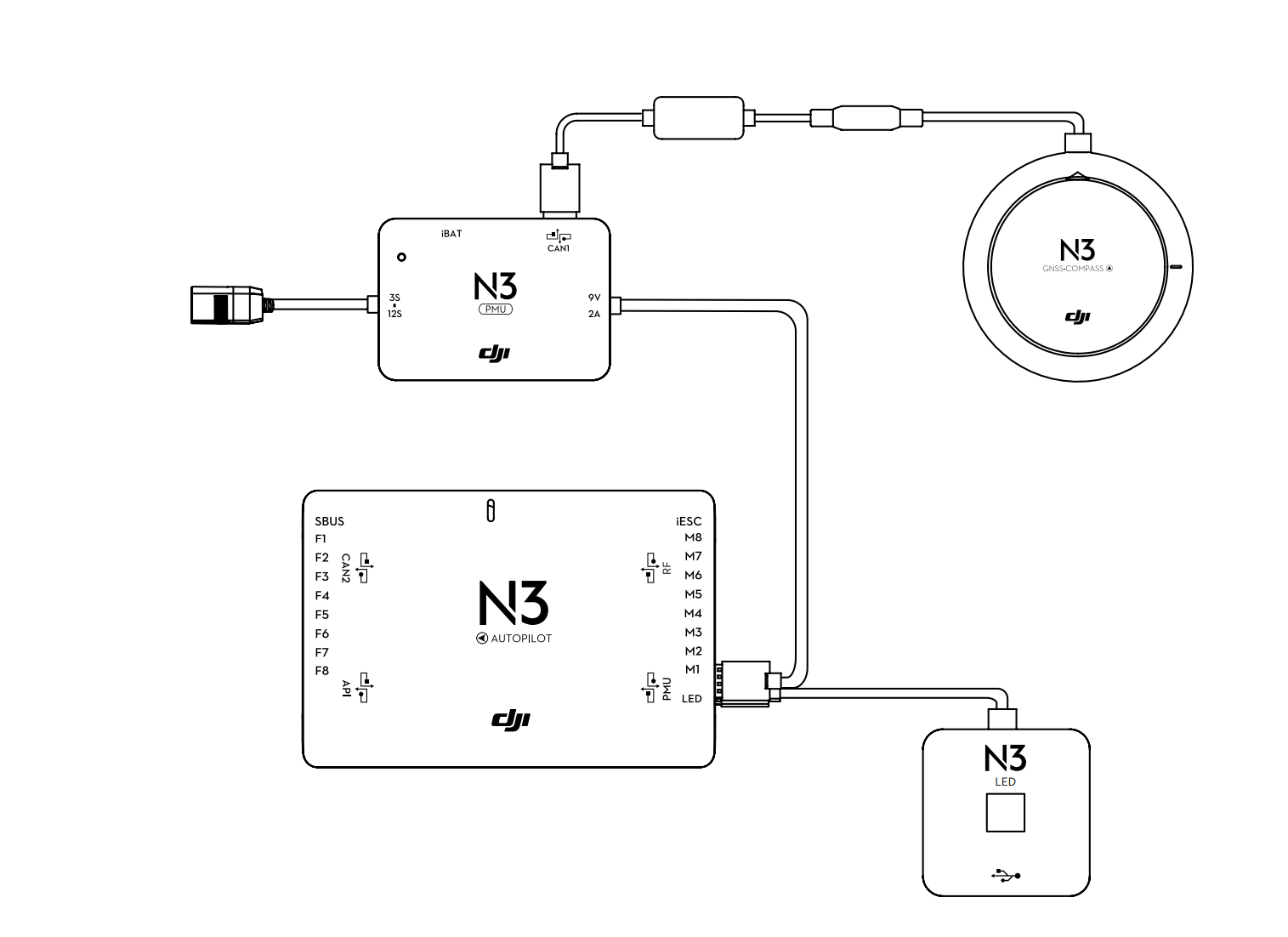
Hardware Components:
- Main Controller (Dual IMU, Data Recorder, and Barometer), with CAN1 connecting to the GNSS-Compass module and DJI devices, and CAN2 connecting to SDK devices; M1 - M8 connecting to the aircraft ESCs, and can communicate with DJI Intelligent ESCs through the iESC port.
- GNSS-Compass module, including GPS/GLONASS dual-mode receiver and compass.
- Power Management Unit (PMU).
- LED module.
Flight Modes:
- P: Positioning mode, using GPS module or vision positioning system for precise hovering.
- A: Attitude mode, without using GNSS or vision positioning system, only providing attitude stabilization. If GPS satellite signal is good, it can achieve return-to-home.
- S: Sport mode, based on automatic positioning mode, with increased sensitivity and maximum attitude angle of 45°.
- G: Gentle mode, in this mode, the aircraft moves more slowly, recommended for beginners.
- M: Manual mode, without using GNSS or vision positioning system, no attitude stabilization, and no attitude angle limitation.
Return-to-Home Functions: Intelligent/Low Voltage/Loss of Control Return-to-Home
Protection Functions: Loss of Control Protection/Low Voltage Protection/Height and Distance Limitation/Special Area Flight Restriction/Output Power Loss Protection (only applicable to hexacopter or above)/Power Protection/Built-in Dual IMU/Built-in Data Recorder/Heading Lock/Return-to-Home Lock
Flight Characteristics: Due to hardware differences, maximum wind resistance is 10 m/s, vertical hovering accuracy is ±0.5 m, horizontal hovering accuracy is ±1.5 m, and maximum yaw angular velocity is 150°/s.
Hardware Installation
The main controller should be facing upwards and parallel to the aircraft body, with the recommended direction towards the front of the aircraft (if it is in a different direction, it needs to be set in the software), and installed as close to the center of gravity of the aircraft as possible.
The LED module can be installed on the lower side of the aircraft body for easy observation of its status during flight.
Pay attention to heat dissipation for the PMU module.
Hardware Debugging
Compass Calibration
- Quickly toggle the P/A mode switch 3 times, at this time the yellow light will be constantly on, entering the calibration state.
- Rotate the aircraft horizontally 360°, at this time the green light will be constantly on.
- Turn the aircraft upside down with the nose facing down, and rotate it horizontally 360°.
- At this time, the lights will blink normally, indicating the completion of calibration. If the red light is blinking, calibration needs to be done again.
Parameter Settings
- Basic Sensitivity (Pitch/Roll/Yaw): As large as possible, but not too large. If it is too large, it will cause excessive feedback and high-frequency shaking during hovering. On the other hand, if it is too small, it will result in longer response time (similar to network latency in games) and shaking.
- Throttle: As large as possible, but if it is too large, takeoff and landing will be too fast and unsafe. If it is too small, it will cause slow takeoff and landing and affect the above parameters.
- Power Bandwidth: Varies depending on the aircraft. If it is too small, it will result in slow response and high-frequency shaking during hovering (insufficient power). If it is too large, it will overcorrect and cause slow oscillation when returning to center.
- Brakes:
- Attitude Sensitivity (Brake/Attitude): The smaller the attitude sensitivity, the slower the attitude command follows the remote control command, and the attitude response is smoother. The brake sensitivity describes the speed of braking. The smaller it is, the smoother the braking process and the longer the braking distance.
- Attitude Sensitivity: The larger the attitude sensitivity, the more aggressive the attitude response. The smaller it is, the slower the response.
This post is translated using ChatGPT, please feedback if any omissions.