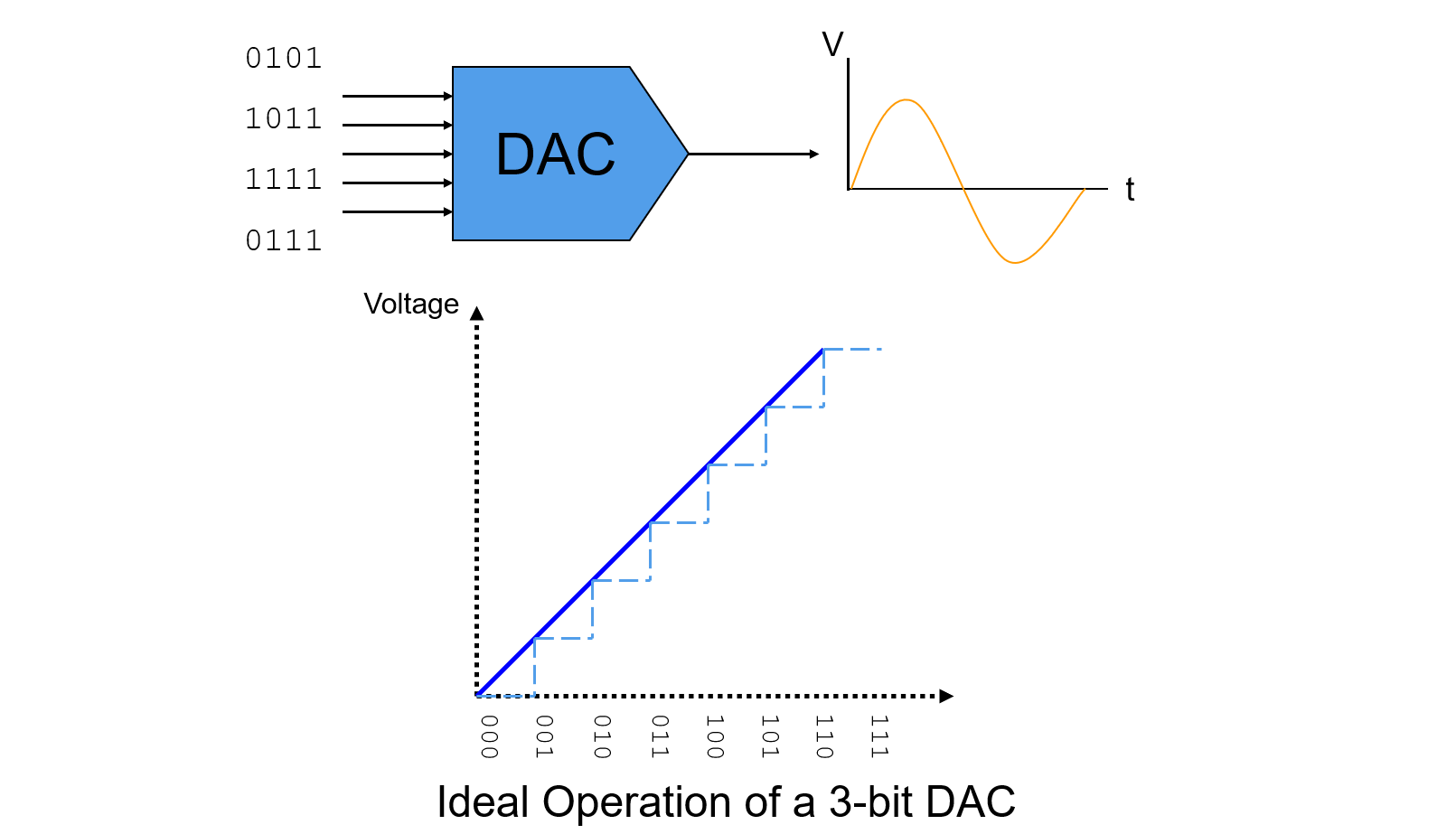
DAC - Static Parameters
محول الرقمي إلى تناظري (ADC) هو جهاز يقوم بتحويل تسلسل من البيانات الرقمية الإدخالية إلى إشارات تناظرية.
المعلمات الثابتة
تحتوي المعلمات الثابتة لمحول الرقمي إلى تناظري (DAC) بشكل أساسي على:
- الإخراج عند الصفر (Zero Scale Output)
- نطاق الإشارة بالكامل (FSR)
- حجم أقل الوحدة الثنائية (LSB)
- خطأ الإزاحة (Offset Error)
- خطأ الربح (Gain Error)
- خطأ اللاخطية التفاضلي (DNE أو DNL)
- خطأ اللاخطية التكاملي (INE أو INL)
الإخراج عند الصفر
الإخراج عند الصفر هو القيمة المقاسة للإخراج عندما يتم تقديم رمز الإدخال الرقمي للمستخدم.
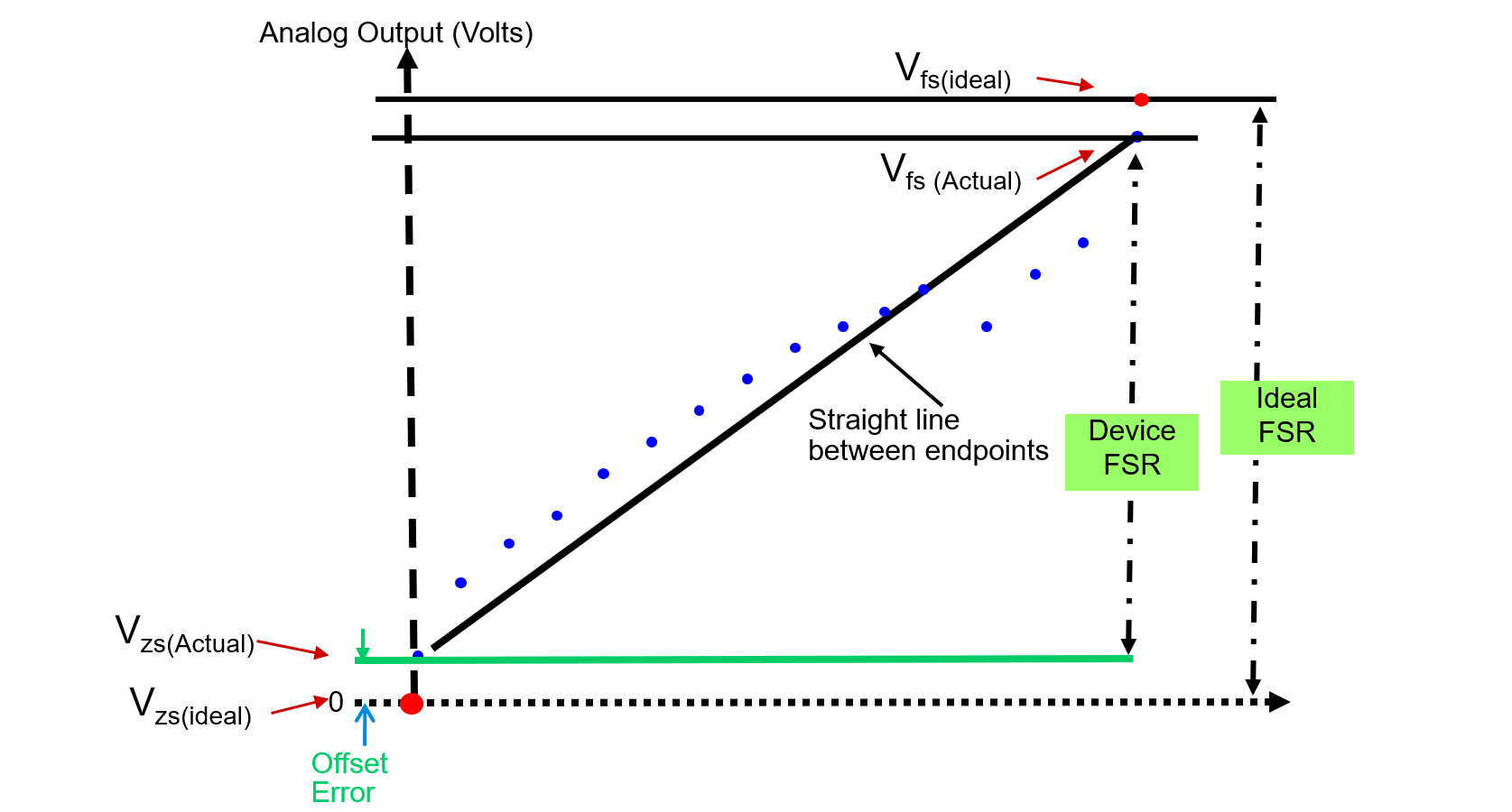
نطاق الإشارة بالكامل (FSR)
النطاق الجهد لإخراج محول الرقمي إلى تناظري (DAC) بين الحد الأدنى (\(V_{ZS}\)) والحد الأقصى (\(V_{FS}\)) للإخراج التناظري يُسمى نطاق الإشارة بالكامل (FSR):
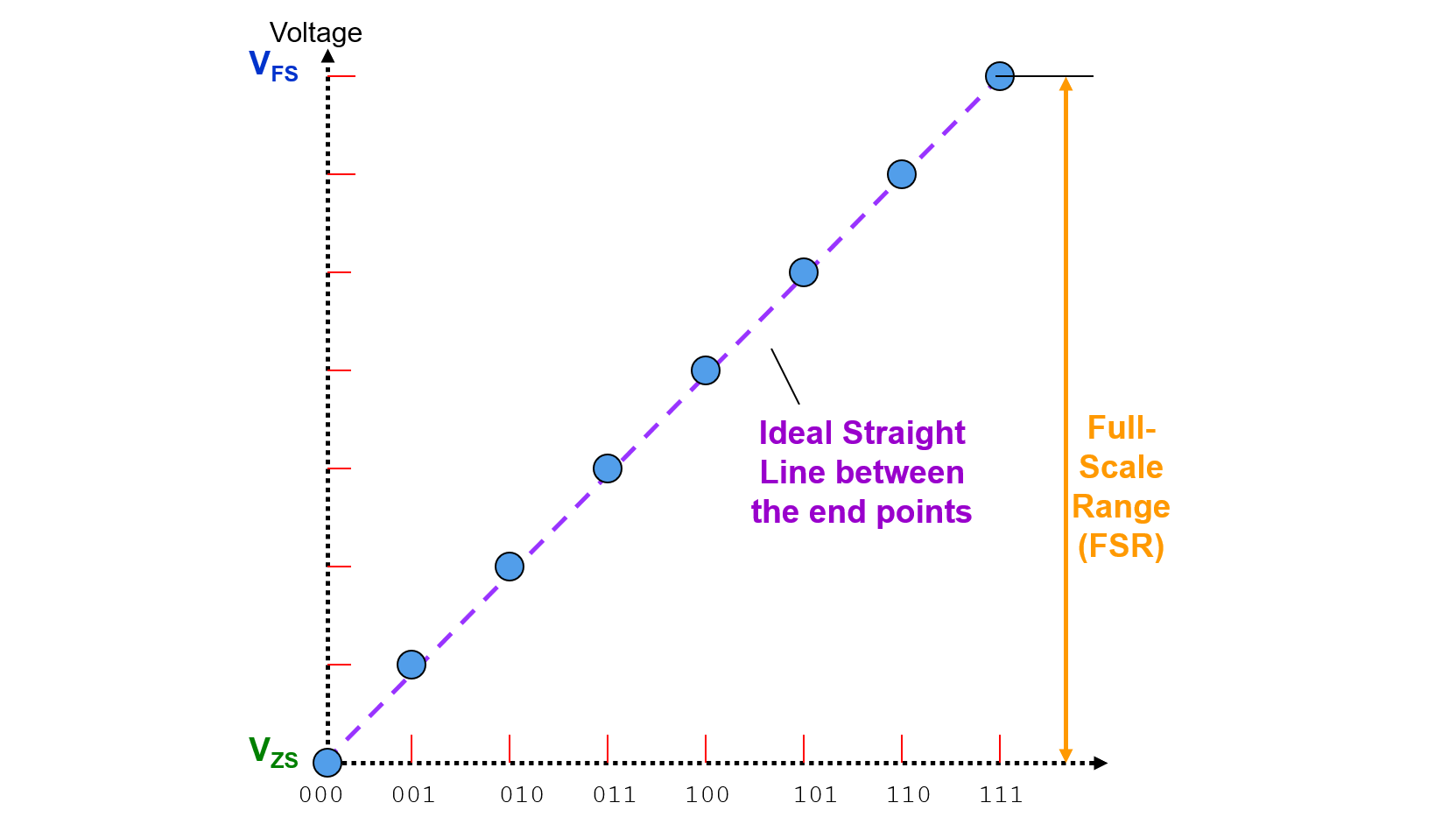
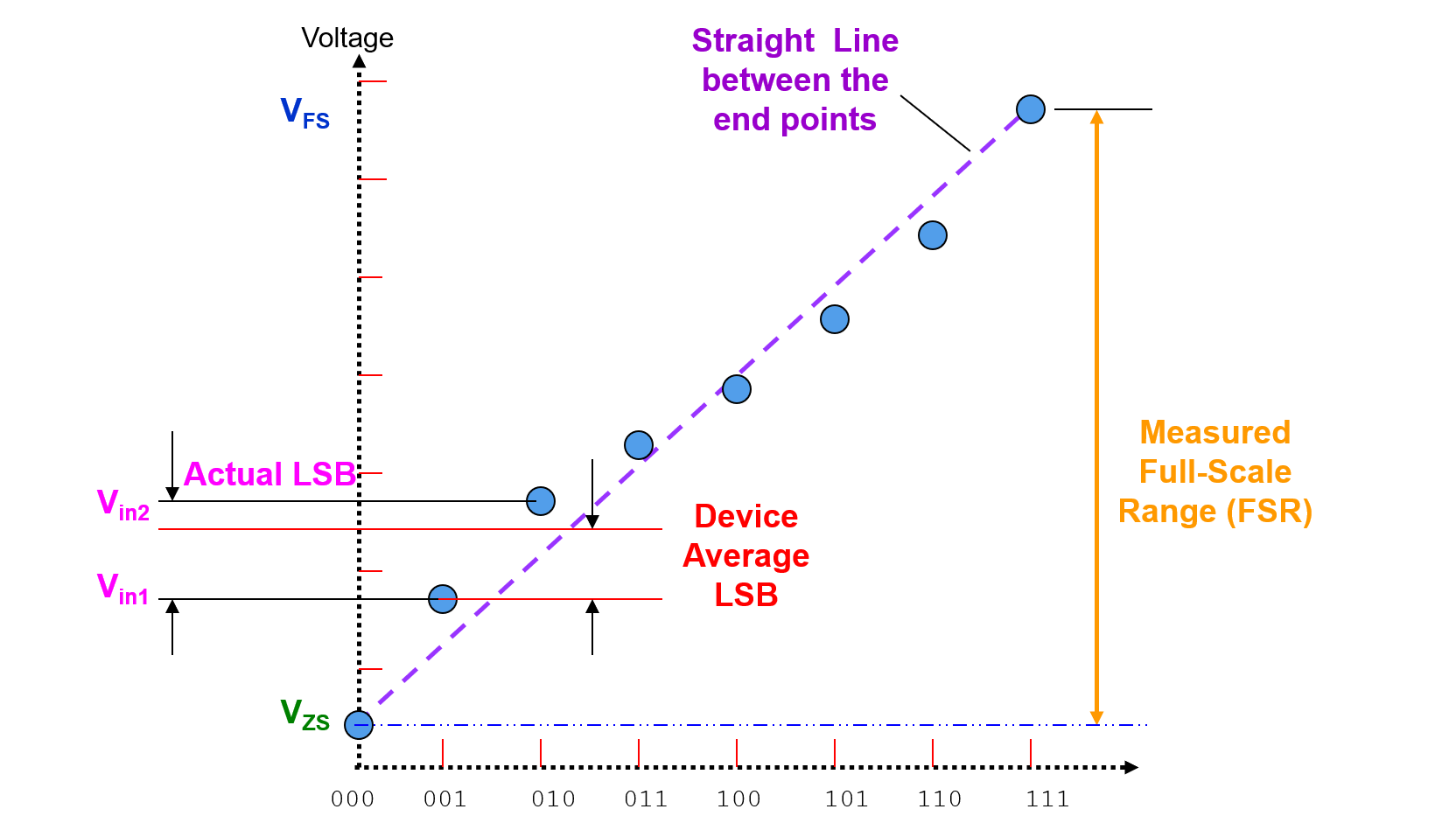
حجم أقل الوحدة الثنائية (LSB)
تُعرف تغيير متوسط الجهد عند الرموز الإدخالية المتوسطة بالوحدة الأقل (LSB):
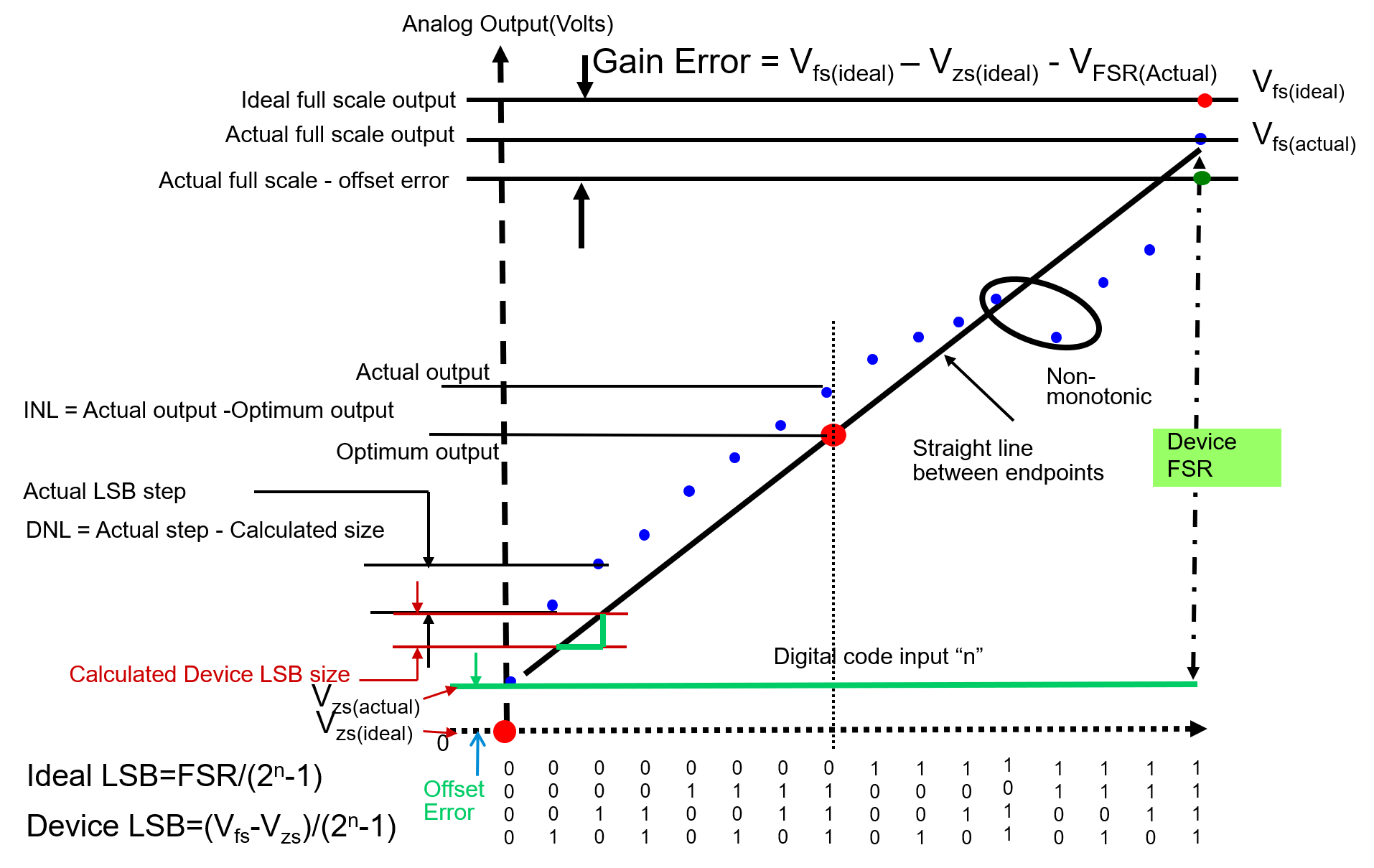
خطأ الإزاحة (Offset Error)
خطأ الإزاحة (الخطأ عند الصفر) هو الفرق الجهد بين النقط الأفتراضية والفعلية (النقط الابتدائية).
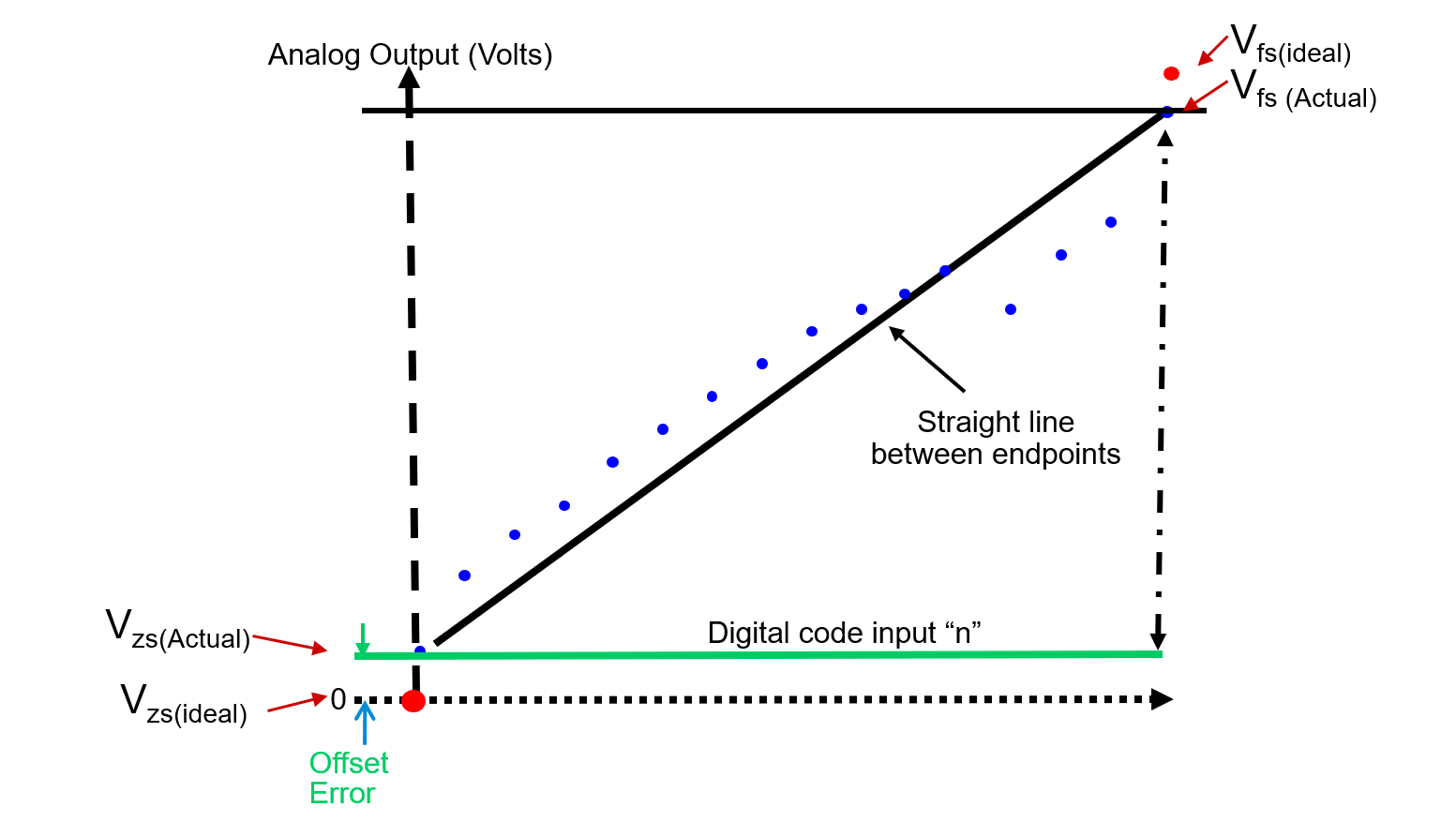
خطأ الربح (Gain Error)
خطأ الربح هو الفرق الجهد بين النقط الأفتراضية والفعلية على الدالة التناقلية.
حيث
خطأ اللاخطية التفاضلي (DNL)
خطأ اللاخطيء التفاضلي (DNL) هو الفرق في الجهد الناتج في نقطة محددة مقارنة بالإخراج في الإدخال السابق، ثم نقص وحدة الخطوة الأصغر:
حيث \(V_{in2}\) هو جهد الانتقال العلوي و\(V_{in1}\) هو السفلي.
DNL هو مقياس لخطأ الخطية "بإشارة صغيرة". يتم قياس DNL من خطوة واحدة إلى الأخرى، وليس من كل خطوة إلى القيمة المثلى.
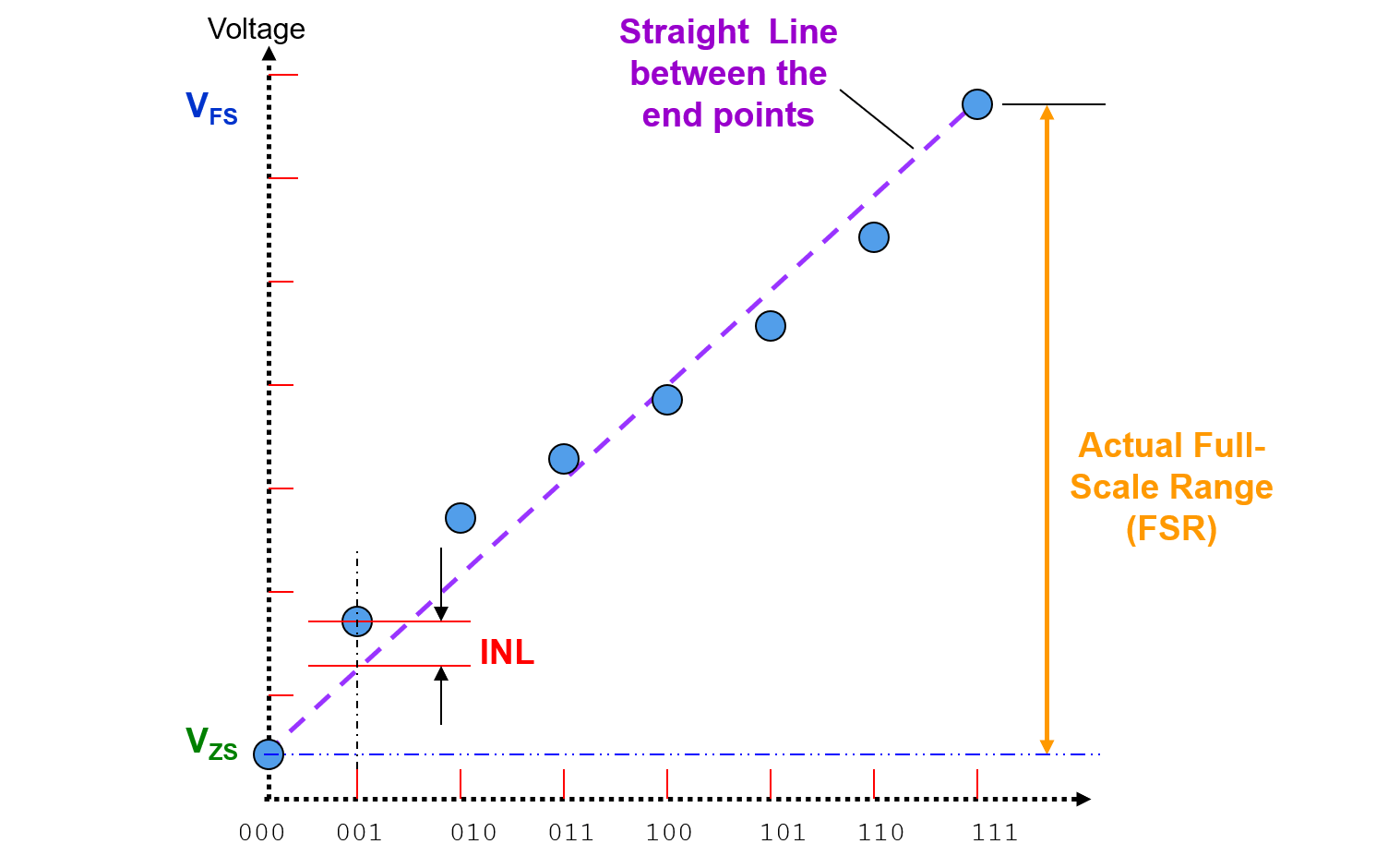
خطأ اللاخطيء التكاملي (INL)
خطأ اللاخطيء التكاملي (INL) هو التأثير التراكمي لجميع قيم الخطأ غير الخطيء التفاضلي. إنه مقياس لخطأ الخطية "بإشارة كبيرة". INL في أي نقطة على المنحنى هو انحراف الخط الخطي المثالي.
بالإضافة إلى ذلك، يمكن التعبير عن INL أيضًا كوظيفة لـ DNL:
كيفية اختبار المعلمات الثابتة
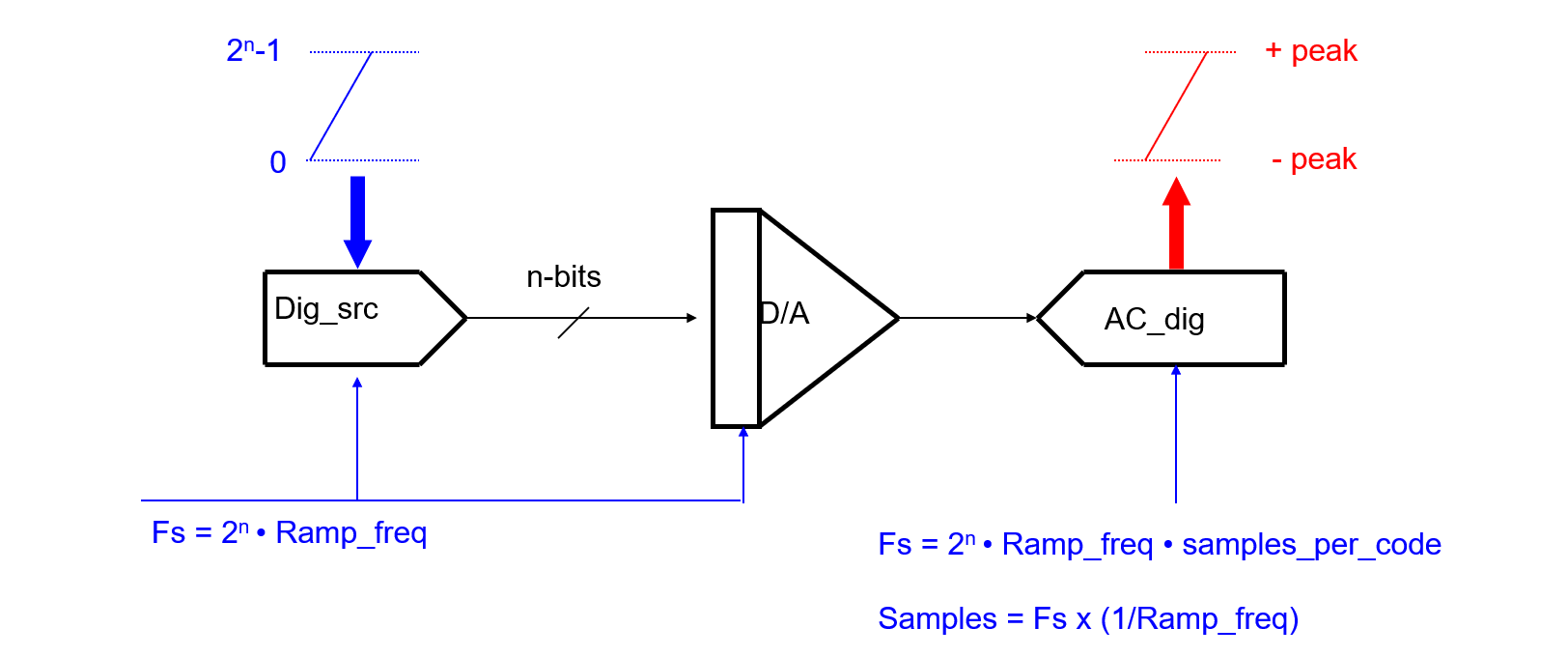
إعداد نظام الاختبار
إعداد نظام الاختبار لاختبار المعلمات الثابتة لجهاز التحكم الرقمي إلى تحليله:
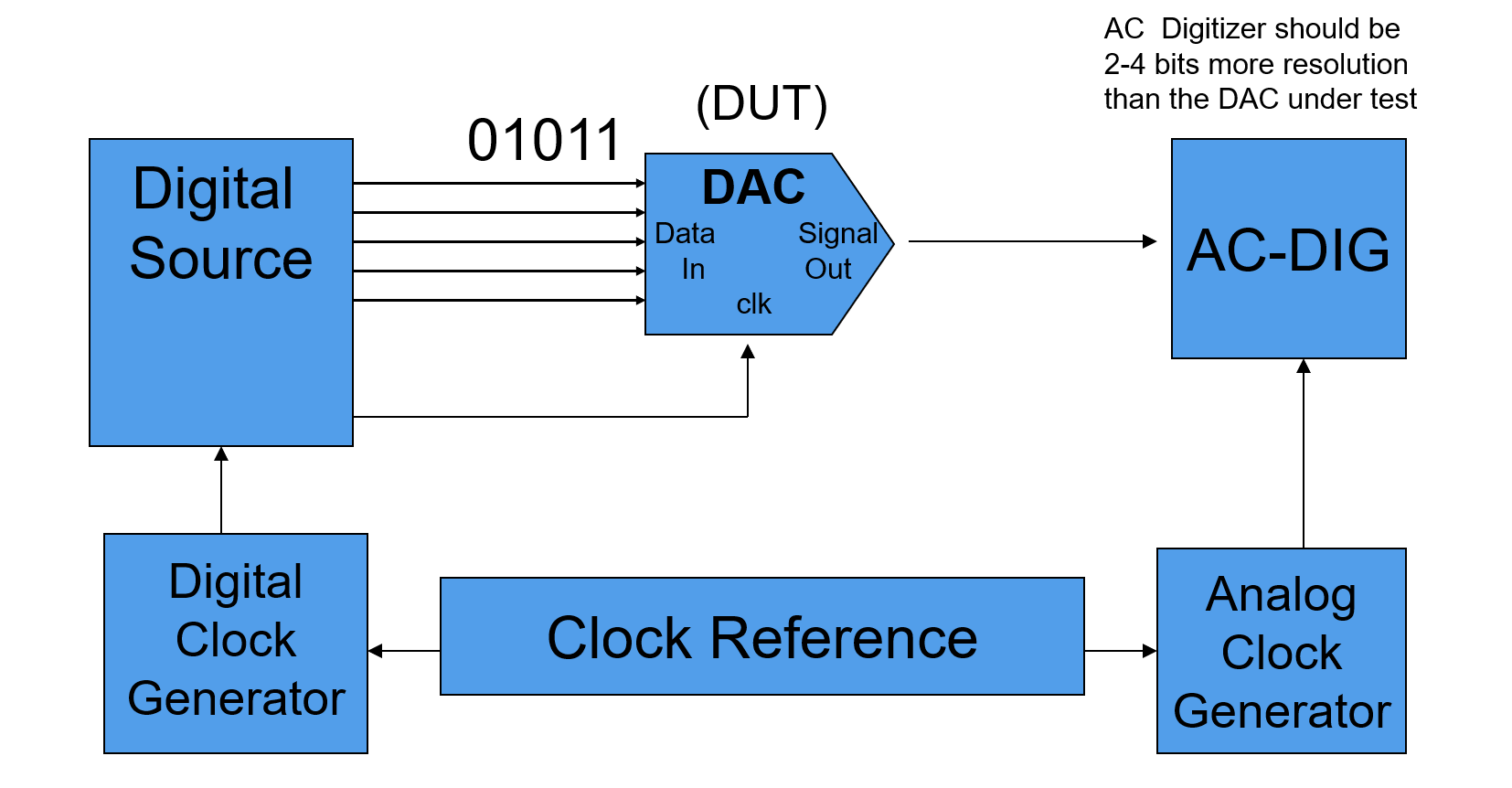
مخطط كتلة لإعداد الإشارة:
مفهوم الاختبارات
يتم سرد إجراء اختبار المعلمات الثابتة لوحدة التحكم الرقمية (DAC) فيما يلي.
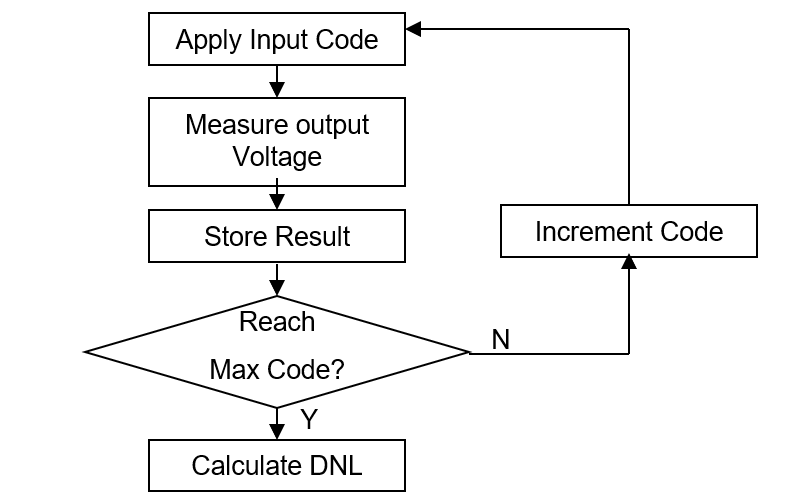
1. قياس الجهد الناتج من خلال تطبيق إدخالات البيانات الرقمية من الصفر إلى القيمة الكاملة
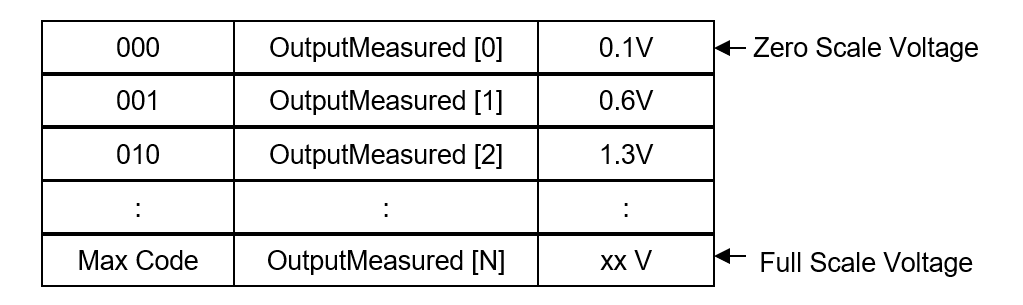
2. حساب DNL لكل رمز إدخال
Here is the provided text translated into Arabic:
$$
DNL[i]=\frac{OutputMeasured[i]-OutputMeasured[i-1]-LSB_{average}}{LSB_{average}}
$$
حيث
$$
LSB_{average}=\frac{OutputMeasured[n]-OutputMeasured[0]}{2^{bits}-1}
$$
#### 3. الحصول على أقصى وأدنى DNL
#### 4. حساب INL لكل خطوة
#### 5. الحصول على أقصى وأدنى INL
## المراجع والشكر
- _أساسيات الاختبار باستخدام ATE_
- _أساسيات اختبار الإشارة المختلطة، براين لو_
> المصدر الأصلي: <https://wiki-power.com/>
> هذا المنشور محمي باتفاقية [CC BY-NC-SA 4.0](https://creativecommons.org/licenses/by/4.0/deed.en)، يجب إعادة إنتاجه مع الإشارة إلى المصدر.
Please note that Arabic text is read from right to left, so the mathematical equations and content will be displayed in the correct direction.
تمت ترجمة هذه المشاركة باستخدام ChatGPT، يرجى تزويدنا بتعليقاتكم إذا كانت هناك أي حذف أو إهمال.