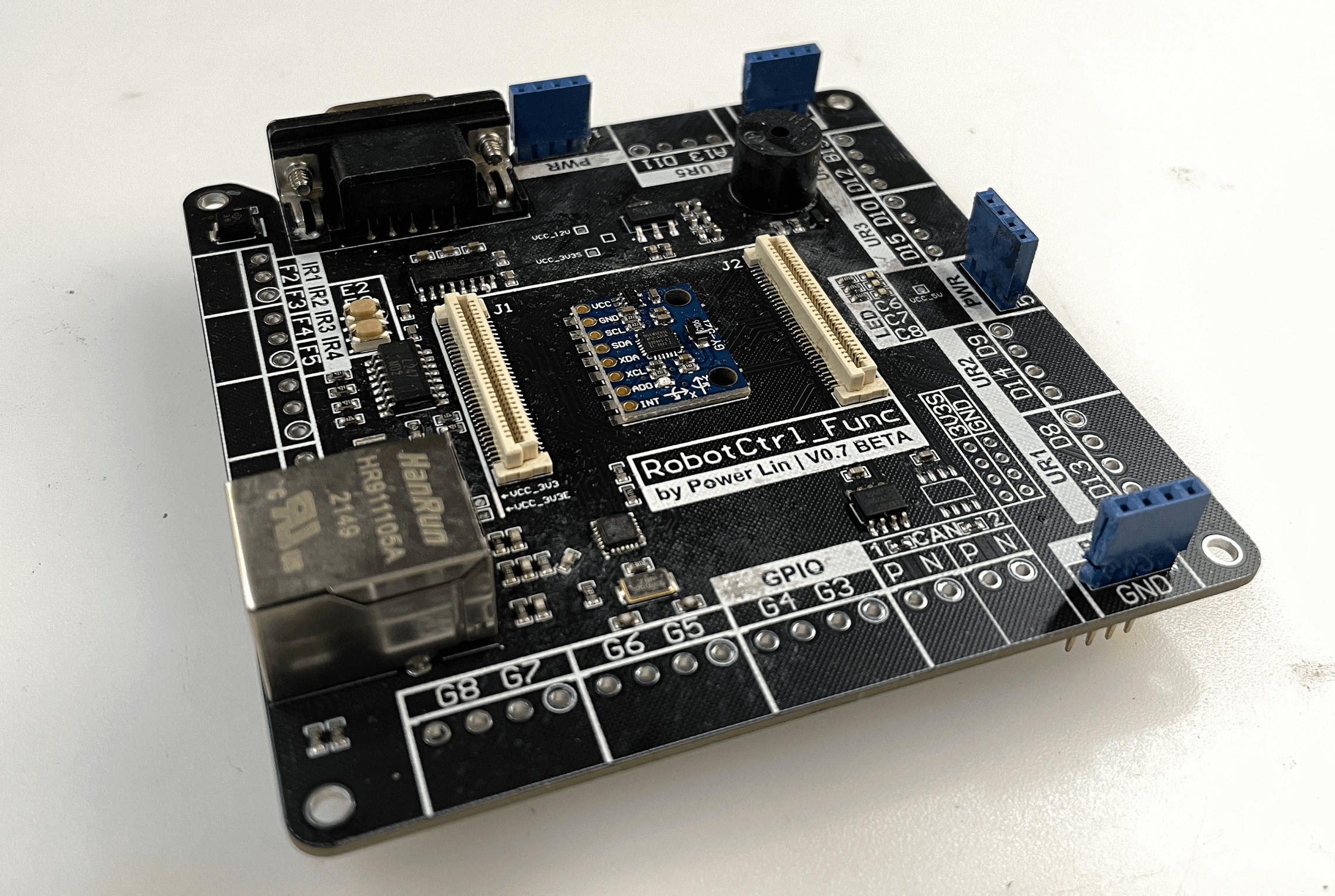
RobotCtrl_Func - 外设拓展板
项目仓库:linyuxuanlin/RobotCtrl/RobotCtrl_Func
项目在线预览:
注:项目包含于 RobotCtrl - STM32 通用开发套件。
原理图设计
RobotCtrl_Func 的主要功能如下:
- 12V 电源输入,5V 电源输入 / 输出,3.3V 电源输出(引出测试点)
- 5V 转 3.3V 供电稳压电路 * 2(供传感器 / 以太网,引出测试点)
- 以太网通信电路
- CAN 通信电路 * 2
- 串口通信电路(RS-232 与 TTL 电平)
- 蜂鸣器电路
- 用户按键 * 2
- 用户 LED * 3
- MPU6050 姿态传感器模块
- 红外测距传感器接口 * 4
- 超声波接口 * 5
- 用户 GPIO 接口 * 6
- B2B 连接器(引出所有 IO)
- SW 下载接口
电源
RobotCtrl_Func 板载 2 路 LDO,原理与 RobotCtrl_Core 中相似,其中一路供外设传感器使用,另一路供以太网电路单独使用。
以太网通信电路
以太网通信基于以太网 PHY 芯片,使用 RMII 接口与单片机通信,通过内置隔离变压器的 RJ45 网口外接网线通信。以太网电路的时钟采用外部 25M 无源晶振,且需要独立供电以减小电源干扰,这里使用了与核心板相同的低压差线性稳压器供电方案,为以太网电路单独供电。以太网通信的原理可以参考文章 HAL 库开发笔记 - 以太网通信(LwIP)。
CAN 通信电路
CAN 通信电路基于 CAN 收发芯片搭建,通过 CAN 差分电平传输。CAN 协议控制器(例如单片机)通过串行线(RX/TX)连接到收发器,在收发器上转换为 CAN 信号(CANH/CANL),并通过 RS 引脚来选择高速 / 静音模式。CAN 总线上需加 120Ω 末端电阻,以匹配阻抗,减少信号的反射。CAN 通信的原理可参考文章 通信协议 - CAN 与 HAL 库开发笔记 - 串口通信。
串口通信电路
RobotCtrl_Func 板载了 RS-232 电平的串口通信电路,并额外引出了 TTL 电平的 USART1/UART5。串口通信的原理可参考文章 通信协议 - 串口通信 与 HAL 库开发笔记 - 串口通信。
RS-232 通信电路是采用 TTL 转 232 电平的芯片,将单片机的 TTL 转换为 RS-232 电平。为提高 EMC 性能,DB9 座子外壳连接引脚可对地接 TVS 二极管,TTL 转 232 芯片需要外加电源去耦与自举电容。
蜂鸣器电路
蜂鸣器电路选用的是 12V 蜂鸣器,用一个三极管即可控制。
用户按键与 LED
用户按键与 LED 原理可参考 RobotCtrl_Core,此处不多赘述。
姿态传感器模块
直接贴装 MPU6050 模块使用,预留 I2C 接口与单片机进行通信。I2C 通信的原理可参考文章 通信协议 - I2C 与 HAL 库开发笔记 - I2C 通信(MPU6050)。
红外测距传感器接口
四路红外测距传感器接口电路因红外传感器使用的是 12V 供电与信号(NPN 常开型),所以从 RobotCtrl_Power 引出 12V 为其供电,并加上四路光耦隔离芯片,以传输高低电平信号。光耦隔离电路的设计,需要根据电流的大小,计算限流电阻的阻值,确保在数据手册规定的触发电压范围内即可。光电耦合器的原理可以参考文章 基本元器件 - 光电耦合器。
电源输入接口与 B2B 连接器
外设拓展板的电源输入接口为 4 个排针,用于与底部的电源供电板相连接。B2B 连接器用于为主控板供电及数据通信。
硬件测试
电源测试
电源输入(以下测试项目都需按照此操作连接电源):
- VCC_12V:通过 P1 输入。
- VCC_5V:通过 P2 或 J1_1/2 输入。
- GND:通过 P3、P4、J1_31/32 或 J2_30/31 与外界共地。
5V 转 3.3V 稳压(供传感器):
- VCC_3V3S:测量 C30 两端电压是否为 3.3V。
5V 转 3.3V 稳压(供以太网):
- VCC_3V3E:测量 C26 两端电压是否为 3.3V。
板载传感器测试
用户按键:
- 配置 PE2/PE3 为 GPIO 上拉输入模式,按下按键读取到低电平,松开为高。
用户 LED:
- 配置 PC6/PC7/PC8 为 GPIO 输出模式,输出高电平,LED 依次点亮;输出低电平熄灭。
MPU6050 姿态传感器模块:
- 测量 M1 模块 1 号引脚对地是否为 VCC_3V3S 电压。
- 测试 IO 引脚连通性。
蜂鸣器:
- 测量 BUZZER1 正极对地是否为 VCC_12V 电压。
- 配置 PC9 为 GPIO 输出模式,输出高电平,蜂鸣器发出声音;输出低电平不发出声音。
串口转 RS232:
- 测量 C3 两端是否为 VCC_3V3S 电压。
- 运行测试程序,通过 PB10/PB11 引脚进行测试。
CAN 总线通信:
- 测量 C10/C13 两端是否为 VCC_5V 电压。
- 运行测试程序(回环测试),通过 PD0/PD1、PB12/PB13 引脚进行测试。
以太网通信:
- 测量 IC2_9 对地是否为 VCC_3V3S 电压。
- 测量 VDD1A/VDD2A 对地是否为 VCC_3V3E 电压。
- 运行测试程序,通过 RMII 接口对以太网通信进行测试。
接口测试
红外测距传感器接口:
- 分别测量 J16/J17/J18/J19 座子的 1 号引脚对地是否为 VCC_12V 电压。
- 配置 PF2/PF3/PF4/PF5 为 GPIO 下拉输入,外部使得 IR1/IR2/IR3/IR4 分别为高电平(VCC_12V),则 PF2/PF3/PF4/PF5 读取到高电平;反之为低电平。
超声波接口:
- 分别测量 J3/J4/J5/J6/J7 座子的 4 号引脚对地是否为 VCC_3V3S 电压。
- 测试 IO 引脚连通性。
用户 GPIO 接口:
- 分别测量 J9/J10/J11 座子的 4 号引脚对地是否为 VCC_3V3S 电压。
- 测试 IO 引脚连通性。
原文地址:https://wiki-power.com/
本篇文章受 CC BY-NC-SA 4.0 协议保护,转载请注明出处。