通信协议 - SPI
SPI(Serial Peripheral Interface)是一种 全双工、同步、串行、主从、总线 通信协议,其数据传输速率为 8 Mbit。SPI 只能有一个主机,可连接一个或多个从机。连接多设备时,需要用到片选引脚(chip select,CS)。
SPI 的引脚
- SCLK(serial clock):由主机驱动的方波时钟信号,从端为输入采样。SDO 和 SDI 上的信号根据 SCLK 上的时钟信号来进行锁存操作。一个时钟周期传输 1bit 数据,所以传输速率等同于主机产生的时钟频率。
- SDI/SDO(serial data in / serial data out):描述了相对于主机的数据流的方向,但更多时候在板子上出现的是 MOSI(Master Out Slave In)和 MISO(Master In Slave Out)。对应地,SDO 在主机上是 MOSI,在从机上是 MISO;而 SDI 在主机上是 MISO,在从机上是 MOSI;在菊花链拓扑中,A 器件 MISO 连接到 B 器件的 MISO。
- CS/SS(chip select / slave select):由主机驱动,用于仲裁 SPI 总线上通信的优先级。当 CS 线上为低电平时,就会激活 SPI 通信。CS 是低电平有效。
SPI 数据锁存操作
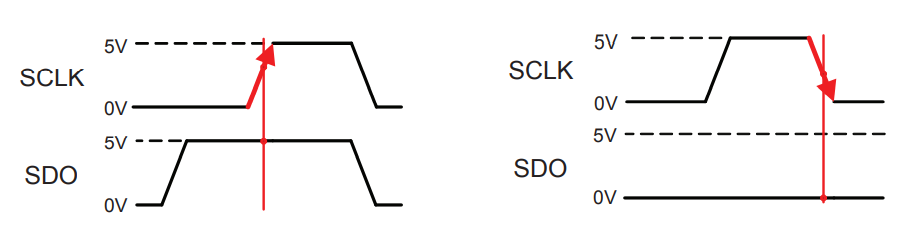
- SPI 数据在 SCLK 上升或下降沿时进行锁存。
- 锁存数据的边沿称为临界边沿。
- 举个例子,以下左图表示 SDO 在上升沿锁存逻辑
1,右图表示在下降沿锁存逻辑0。
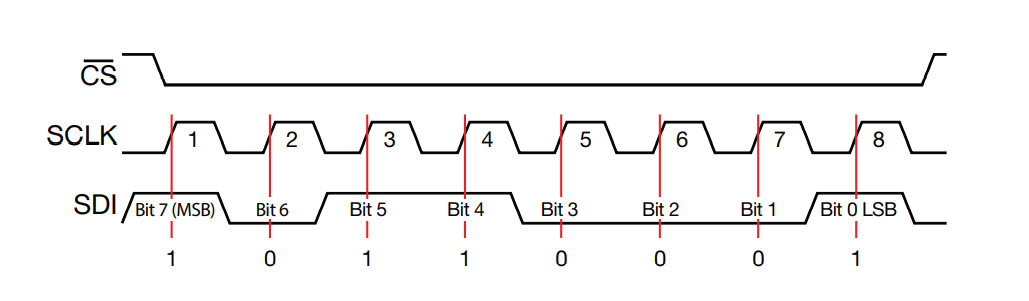
SPI 读取句段示例
- 临界边沿为上升沿
- 主机输出到从机(在从机上为 SDI)
- CS 脚被拉低为 0V,以激活 SPI
- 数据在 SCLK 上升沿时,从高位(MSB)到低位(LSB)按顺序进行传输
- 完成传输数据:
1011001
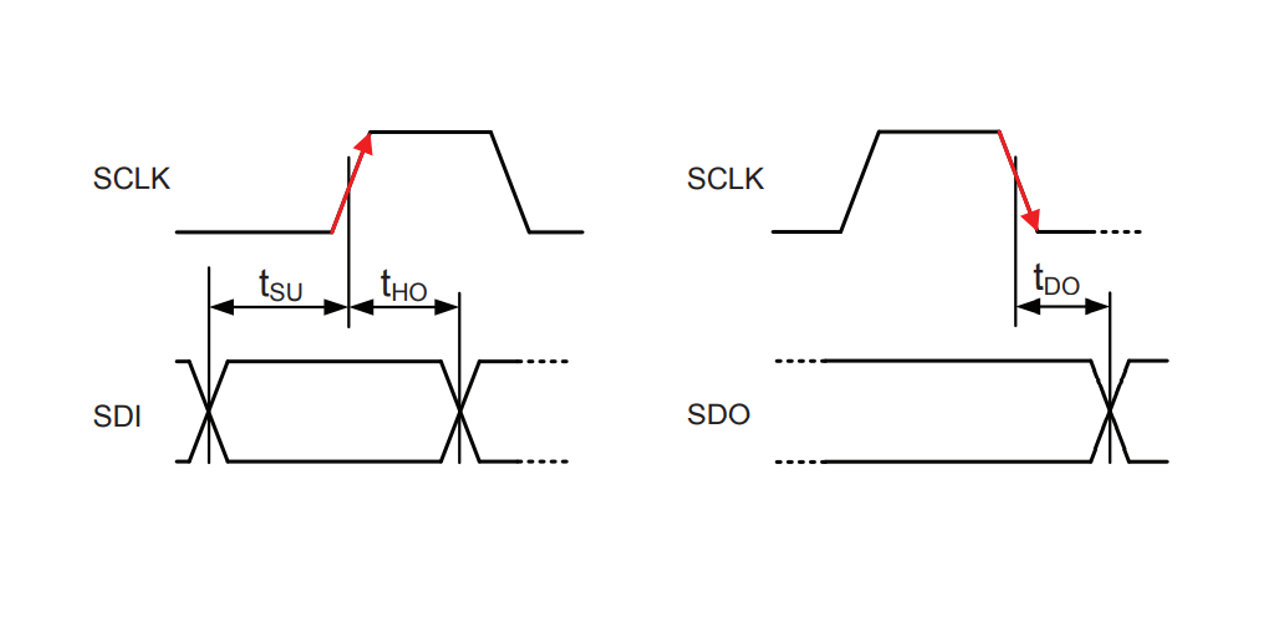
SPI 临界边沿
- \(t_{SU}\)(setup time):定义在临界边沿事件发生多久前,SDI 数据就该被确定并稳定下来。
- \(t_{HO}\)(hold time):定义在临界边沿事件发生后,SDI 上的数据必须保留多长时间。
- \(t_{DO}\)(delay time):定义在临界边沿事件发生后,SDO 上的有效数据的延迟时间。
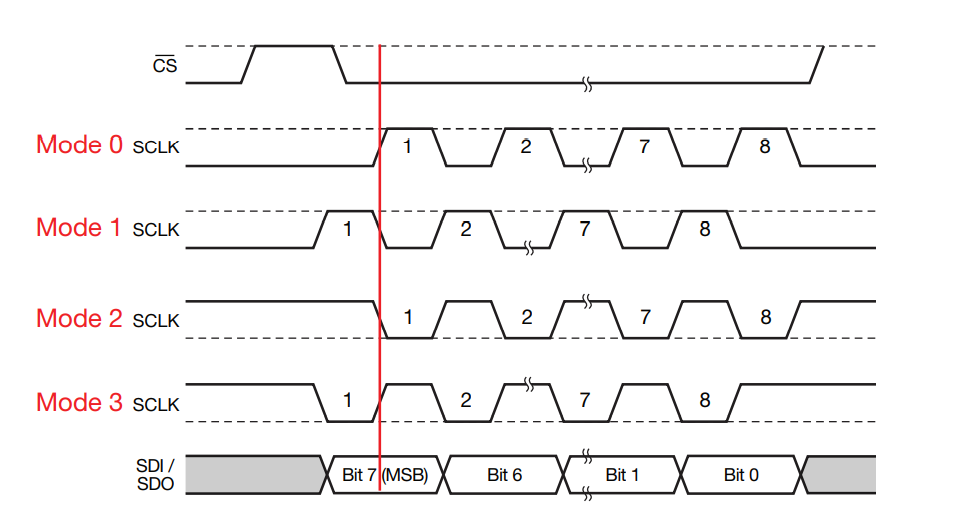
SPI 传输模式(4 种)
- CPOL(clock polarity,时钟极性):空闲(不传输数据)时钟的极性,
0代表低电平,1代表高电平。 - CPHA(clock phase,时钟相位):定义在上升还是下降沿进行锁存。
0代表在第一个变化的边沿进行锁存;1代表在第二个变化的边沿进行锁存。
| 模式编号 | CPOL(时钟极性) | CPHA(时钟相位) | 锁存边沿 |
|---|---|---|---|
| 0 | 0(低电平) | 0(在第一个边沿进行锁存) | 上升沿 |
| 1 | 0(低电平) | 1(在第二个边沿进行锁存) | 下降沿 |
| 2 | 1(高电平) | 0(在第一个边沿进行锁存) | 下降沿 |
| 3 | 1(高电平) | 1(在第二个边沿进行锁存) | 上升沿 |
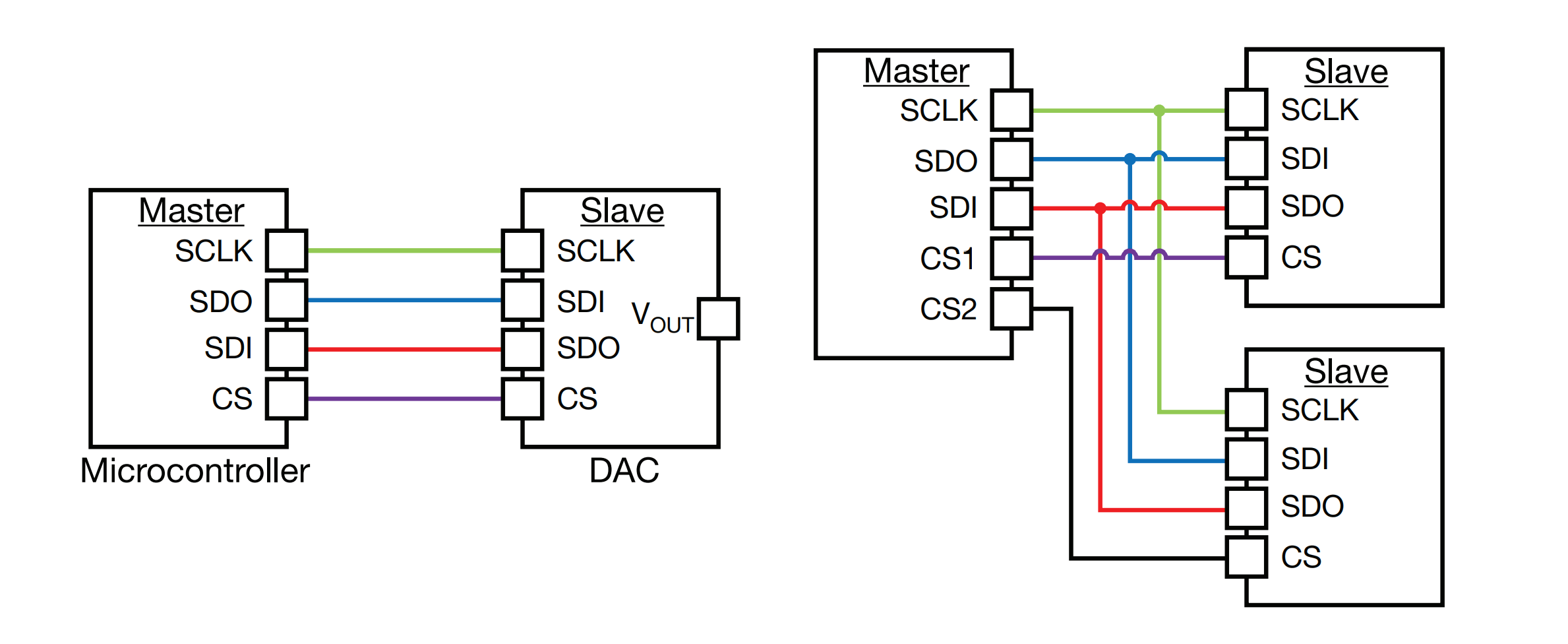
菊花链(Daisy Chain)
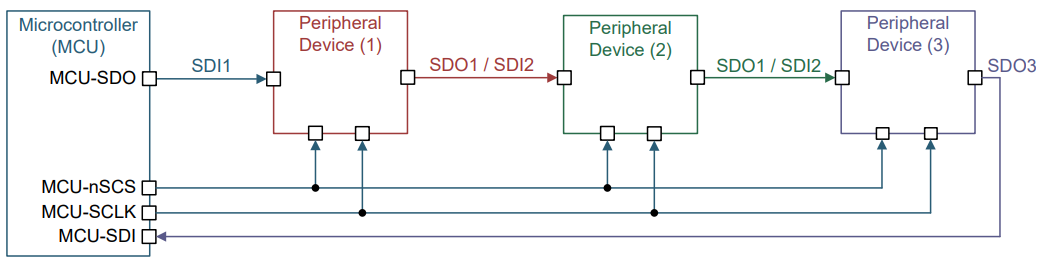
在普通模式下,SPI 每个从机都需要一条 CS 线。当从机一多,会占用主机过多的 IO 口。使用菊花链的拓扑连接,就可以只用一条 CS 线,驱动所有的从机。
菊花链的原理是,数据从主机传输到第一个从机,然后从第一个从机传输到第二个从机,依此下去,数据沿着线路级联,直到系列中的最后一个从机,最后的一个从机通过 SDO 将数据传送到主机。
SPI 的优缺点
优点:
- 全双工通信
- 推挽驱动,能提供比较好的信号完整性和较高的速度
- 协议灵活,不仅限于 8-bit 一个字节
- 硬件设计简单
- 不需要上拉电阻,因此功耗更低
- 没有仲裁机制或相关的失效模式
- 从机不需要时钟(由主机提供)
- 从设备不需要单独的地址
- 不需要收发器
- 信号都是单向的,容易进行电流隔离
- 时钟速率没有上限
缺点:
- 用到的引脚比 I2C 多
- 从机无法进行硬件应答
- 没有错误检查机制,如 UART 中的奇偶校验位
- 只能有一个主机
- 规范不统一,无法验证一致性
- 传输距离相对比较近(相比 CAN、RS232、RS485 等)
参考与致谢
- 《Analog Engineer’s Pocket Reference》
原文地址:https://wiki-power.com/
本篇文章受 CC BY-NC-SA 4.0 协议保护,转载请注明出处。