大疆 N3 飞控 - 参考资料
资料及软件下载
基础知识
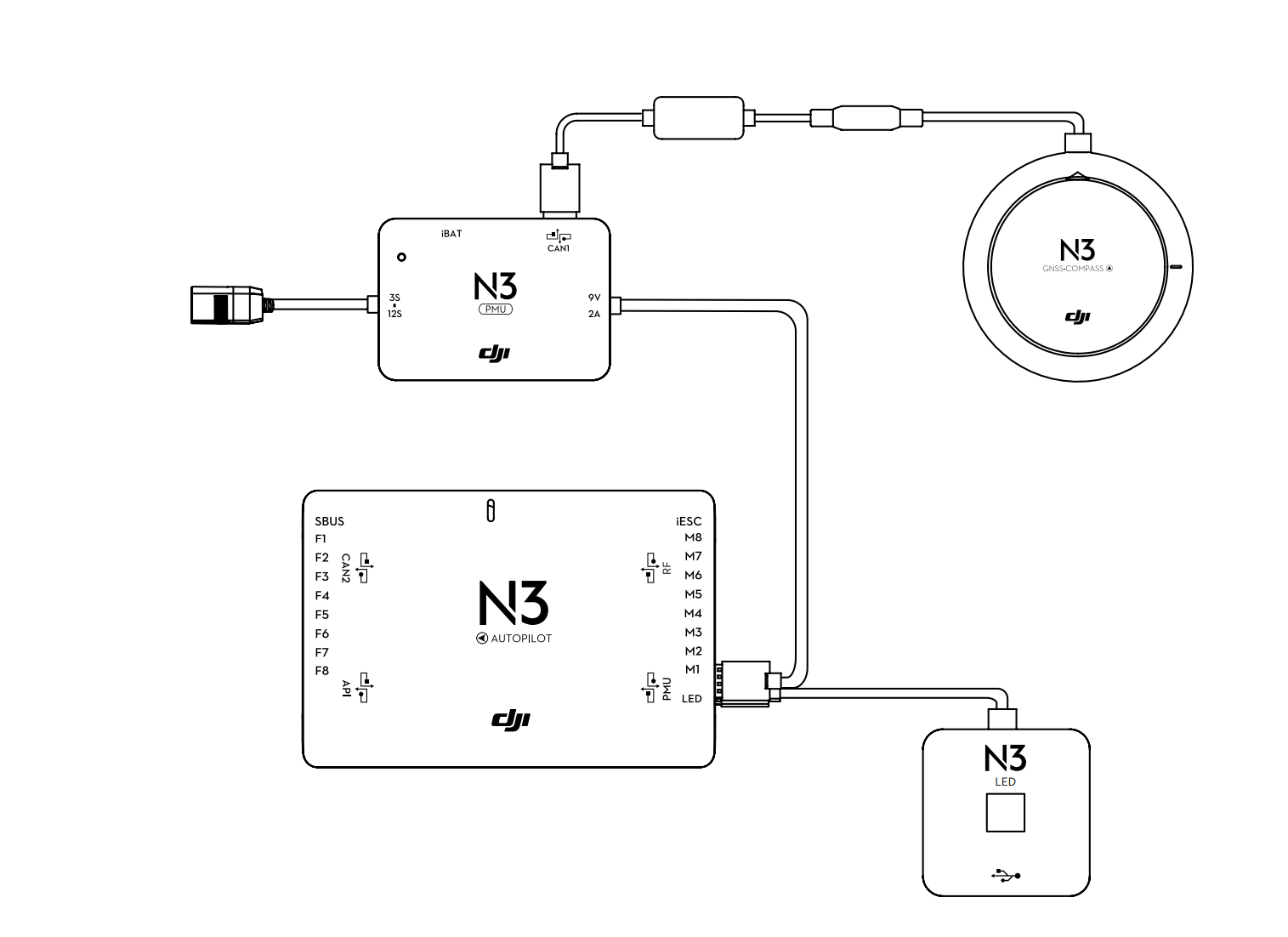
硬件组成:
- 主控器(双 IMU、数据记录仪和气压计),其中 CAN1 连接 GNSS-Compass 模块和 DJI 设备,CAN2 连接 SDK 设备;M1 - M8 连接飞行器电调,且可通过 iESC 端口与 DJI 智能电调通信。
- GNSS-Compass 模块,含 GPS / GLONASS 双模接收机和指南针。
- 电源管理模块(PMU)。
- LED 模块。
飞行模式:
- P:定位模式,使用 GPS 模块或视觉定位系统以实现飞行器精确悬停。
- A:姿态模式,不使用 GNSS 与视觉定位系统,仅提供姿态增稳,若 GPS 卫星信号良好可实现返航。
- S:运动模式,基于自动定位模式,增加感度,姿态角最大可 45°
- G:迟缓模式,此模式下飞机运动较为迟缓,建议新手使用。
- M:手动,不使用 GNSS 与视觉定位系统,没有姿态增稳,无姿态角度限制。
返航功能:智能 / 低电压 / 失控返航
保护功能:失控保护 / 低电压保护 / 高度距离限制 / 特殊区域飞行限制 / 输出动力缺失保护(六旋翼以上才有用) / 动力保护 / 内置双 IMU / 内置数据记录仪 / 航向锁定 / 返航锁定
飞行特性:因硬件而差异,最大抗风 10 m/s,悬停精度垂直 ±0.5 m,水平 ± 1.5 m,最大偏航角速度 150 °/s
硬件安装
主控器朝上并与机身平行,推荐方向朝向机头(若是别的方向,要在软件里设置),尽量安装在飞行器重心。
LED 模块可装在机身侧下方,方便飞行时观察状态。
PMU 模块要注意散热。
硬件调试
指南针校准
- 快速拨动 3 次 P / A 模式切换开关,此时黄灯常亮,进入校准状态。
- 水平旋转飞行器 360°,此时绿灯常亮。
- 使飞行器机头朝下,水平转 360°。
- 此时灯正常闪烁,完成校准。若红灯闪烁,则需重新校准。
参数设置
- 基础感度(俯仰 / 横滚 / 航向):尽可能大,但也不要太大,太大会反馈过度,在悬停状态下高频抖动;反之如果太小则造成响应时间变长(可以类比游戏的网络延迟)且晃动。
- 油门:尽可能大,但过大起降过快,不安全;过小则会造成起降过慢,且影响上面几个参数。
- 动力带宽:因不同飞机而异,过小会造成响应慢、悬停状态下高频抖动(不够力);过大则修正过度,回中时出现慢速晃动 。
- 刹车:
- 姿态灵敏度(刹车 / 姿态):姿态灵敏度越小则姿态命令跟随遥控器指令越慢,姿态响应更加平缓;刹车灵敏度描述刹车的快慢程度,越小则刹车过程越平缓且 刹车距离越长 。
- 姿态感度:过大则姿态响应更加迅猛,越小则响应迟缓